Multiple Choice Questions and Answers on Automatic Control System
Last Updated on September 27, 2023 by Sasmita
Multiple Choice Questions and Answers on Automatic Control System
Q1. From the noise point of view, bandwidth should be
a) large
b) not too large
c) should be as large as possible
d) infinite
Answer : b
Q2. In a two phase ac servomotor rotor resistance is R and rotor reactance is X. The speed curve will be linear if
a) (X/R)<<1
b) (X/R) >>1
c) (X/R)=1
d) X²=R
Answer : a
Q3. A stepper motor is
a) a two phase induction motor
b) is an electromagnetic transducer used to convert an angular position of shaft into electrical signal
c) is an electromechanical device which actuates a train of step angular movements in response to a train of input pulses on one to one basis
d) is a kind of rotating amplifier
Answer : d
Q4. First column elements of Routh’s tabulation are 3, 5, -3/4, 1/2, 2. It means
a) there is one root in left half s plane
b) there are two roots in left half s plane
c) there are two roots in right half s plane
d) there is one root in right half s plane
Answer : c
Q5. When a unit step voltage drives a lag network the output
a) remains constant at unit step value
b) increases exponentially from zero to final value
c) decreases exponentially from 1 to 0
d) none of the above
Answer : b
Q6. A system has its two poles on the negative real axis and one pair of poles lies on jω axis. The system is
a) stable
b) unstable
c) limitedly stable
d) none of the above
Answer : c
Q7. Bellows converts
a) pressure difference into displacement
b) pressure difference into voltage
c) displacement into pressure difference
d) none of the above
Answer : a
Q8. Assertion (A): The steady state response, of a stable, linear, time invariant system, to sinusoidal input depends on initial conditions.
Reason (R): Frequency response, in steady state, is obtained by replacing s in the transfer function by jω
a) Both A and R are correct and R is correct explanation of A
b) Both A and R are correct but R is not correct explanation of A
c) A is correct but R is wrong
d)R is correct but A is wrong
Answer : d
Q9. The phase margin and damping ratio have no relation.
a) True
b) False
Answer : b
Q10. For the transport lag G(jω) = e-jωT, the magnitude is always equal to
a) 0
b) 1
c) 10
d) 0.5
Answer : b
Q11. The log magnitude curve for a constant gain K is a
a) horizontal straight line
b) horizontal straight line of magnitude 20 log K decibels
c) an inclined line having slope K
d) an inclined line having slope -K
Answer : b
Q12. A lag compensator is essentially a
a) low pass filter
b) high pass filter
c) band pass filter
d) none of the above
Answer : a
Q13. Stepper motors find applications in
a) X-Y plotters
b) numerically controlled machining equipment
c) printers
d) all of the above
Answer : d
Q14. For type 2 system, the magnitude and phase angle of the term (jω)2 in the denominator, at ω = 0, are respectively
a) 0 and – 90°
b) 0 and + 90°
c) infinity and – 180°
d) infinity and + 180°
Answer : c
Q15. In an integral controller
a) the output is proportional to input
b) the rate of change of output is proportional to input
c) the output is proportional to rate of change of input
d) none of the above
Answer : b
Q16.In Bode diagram (log magnitude plot) the factor 1/jω in the transfer function gives a line having slope
a) -20 dB per octave
b) -10 dB per octave
c) -6 dB per octave
d) -2 dB per octave
Answer : c
Q17. Bode magnitude plot is drawn between
a) magnitude of network function and ω
b) dB magnitude and log ω
c) dB magnitude and ω
d) loge (magnitude) and log ω
Answer : b
Q18. The system in the given figure, has
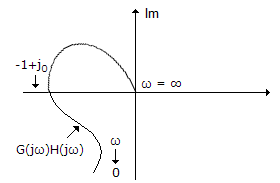
a) good gain and phase margin
b) poor gain and phase margin
c) good gain margin but poor phase margin
d) poor gain margin but good phase margin
Answer : d
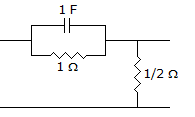
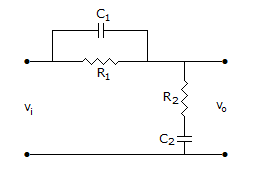
Q19. For very low frequencies, v0/vi in the given figure equals
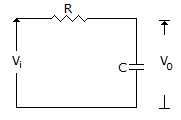
a) 1
b) 0
c) 0.5
d) infinity
Answer : a
Q20. In a minimum phase system
a) all poles lie in the left half plane
b) all zeros lie in the left half plane
c) all poles lie in the right half plane
d) all except one pole or zero lie in the left half plane
Answer : b
Q21. For the control system in the given figure, the value of K for critical damping is
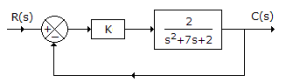
a) 1
b) 5.125
c) 6.831
d) 12
Answer : b
Q22. In the given figure, if R = XC, voltage gain is
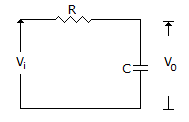
a) 0 dB
b) -3 dB
c) 3 dB
d) 10 dB
Answer : b
Q23. In the given figure the input is x(t) = A sin ωt. The steady state output y(t) =
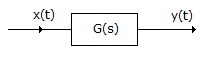
a) A sin (ωt + φ) where φ = tan-1 |G(jω)|
b) |G(jω)| A sin [ωt + ∠G(jω)]
c) |G(jω)| A sin [2ωt + ∠G(jω)]
d) A G(jω) sin [ωt + ∠G(jω)]
Answer : b
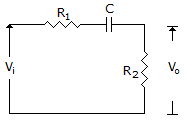
Q24. The compensator of the given figure is a
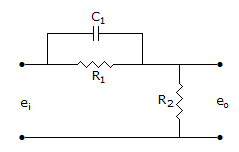
a) lag compensator
b) lead compensator
c) lag-lead compensator
d) none of the above
Answer : b
Q25. In the given figure, of potentiometer V0 = Vi (R0/Ri) only when
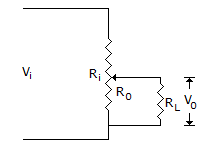
a) RL = 0
b) RL = ∞
c) RL is neither low nor high
d) RL is low but not zero
Answer : b
Q26. For the system of the given figure, the damping ratio of closed loop poles is
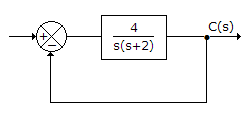
a) 1.5
b) 1
c) 0.5
d) 0.25
Answer : c
Q27. The first column of a Routh array is
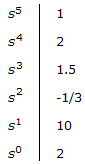
How many roots of the corresponding characteristic equation are in left half s-plane?
a) 2
b) 3
c) 4
d) 5
Answer : b
Q28. The entries in the first column of Routh array of a fourth order are 5, 2, – 0.1, 2, 1. The number of poles in the right half plane are
a) 1
b) 2
c) 3
d) 4
Answer : b
Q29. In Bode diagram (log magnitude plot) the factor (jω)n in the transfer function gives a line having slope
a) 20 dB/decade
b) 20n dB/decade
c) (20/n )dB/ decade
d) -20n dB/decade
Answer : b
Q30. The magnitude of transport lag factor is always zero.
a) True
b) False
Answer : b
Q31. For a quadratic factor in transfer function the phase angle is not a function of damping factor.
a) True
b) False
Answer : b
Q32. The current rating of dc tachogenerator is usually
a) small
b) high
c) medium
d) either (b) or (c)
Answer : a
Q33. For the compensator in the given figure the maximum phase lead is
a) sin-1 (1/3)
b) 30°
c) 45°
d) 60°
Answer : b
Q34. Assertion (A): Positive feedback is not used in any circuit.
Reason (R): Positive feedback leads to instability.
a) Both A and R are correct and R is correct explanation of A
b) Both A and R are correct but R is not correct explanation of A
c) A is correct but R is wrong
d) R is correct but A is wrong
Answer : d
Q35. If the Nyquist plot does not encircle the (-1 + j0) point the system is always stable.
a) True
b) False
Answer : b
Q36. Assertion (A): When the phase margin of a control system is improved using a lead network, noise transmission increases.
Reason (R): Phase lead compensation increases bandwidth.
a) Both A and R are correct and R is correct explanation of A
b) Both A and R are correct but R is not correct explanation of A
c) A is correct but R is wrong
d) R is correct but A is wrong
Answer : a
Q37. In liquid flow system the capacitance of a water tank is defined as
a) change in liquid stored / change in head
b) change in head / change in liquid stored
c) change in flow rate / change in head
d) none of the above
Answer : a
Q38. For a first order system having transfer function  , the unit ramp response is
, the unit ramp response is
a) T(1 – e-t/T)
b) t – T + T e-t/T
c) t + T + T e-t/T
d) t + 2T e-t/T
Answer : b
Q39. In a second order system, the time constant t of exponential envelopes depends
a) only on damping factor
b) only on natural frequency
c) both on damping factor and natural frequency
d) neither on damping factor nor on natural frequency
Answer : c
Q40. The maximum shift which can be provided by a lead compensator with transfer function 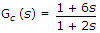 is
is
a) 15°
b) 30°
c) 45°
d) 60°
Answer : b
Q41. The network of the given figure is a
a) lag network
b) lead network
c) lag-lead network
d) any of the above
Answer : b
Q42. For a second order system, the position of poles is in the shaded region shown in the given figure. The variation in damping factor is
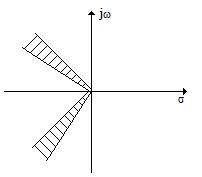
a) from 0 to 1
b) from about 0.3 to 0.7
c) from 1 to 5
d) from 0 to 3
Answer : b
Q43. For a factor  in the transfer function, the log magnitude plot
in the transfer function, the log magnitude plot
a) is a straight line with slope 0 dB/decade
b) is a straight line with slope 20 dB/decade
c) is a straight line with slope – 20 dB/decade
d) is a straight line with slope – 40 dB/decade
Answer : d
Q44. The frequency at which magnitude of closed loop frequency response is 3 dB below its zero frequency value is called critical frequency.
a) True
b) False
Answer : b
Q45. The transfer function  has the characteristics of high pass filter.
has the characteristics of high pass filter.
a) True
b) False
Answer : b
Q46. The system of the given figure
a) has two poles and one zero in left half plane
b) has two poles and one zero in right half plane
c) has two poles in left half plane and zero in right half plane
d) none of the above
Answer : c
Q47. If phase angle of open loop transfer function becomes – 180° at frequency ω1, then gain margin is equal to
a) |G(jω1)|
b) 1/ |G(jω1)|
c) 1+ |G(jω1)|
d) 1/ 1+|G(jω1)|
Answer : b
Q48. Assertion (A): The time response of the system with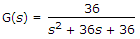 will not have any overshoot for unit step input.
will not have any overshoot for unit step input.
Reason (R): A critically damped system does not have any overshoot to a unit step input.
a) Both A and R are correct and R is correct explanation of A
b) Both A and R are correct but R is not correct explanation of A
c) A is correct but R is wrong
d) R is correct but A is wrong
Answer : c
Q49. Lag compensation increases bandwidth of the system.
a) True
b) False
Answer : b
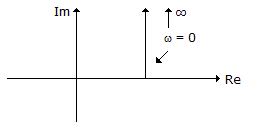
Q50. The polar plot of the given figure is for the term
a) (jω)2
b) 1 + (jω)2
c) 1/ (jω)2
d) 1/(1 + jω)
Answer : c
Q51. For the unity feed back system of the given figure, the closed loop transfer function is
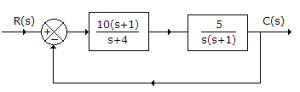
a) 50/ s²+4s+50
b) 50/s+50
c) 50/s(s+4)
d) 50/s²+50
Answer : a
Q52. The effect of negative feedback on distortion and bandwidth because
a) both are decreased
b) both are increased
c) distortion is reduced and bandwidth is increased
d) distortion is increased and bandwidth is decreased
Answer : c
Q53. The polar plot of 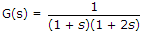
a) does not cross real axis
b) crosses real axis
c) crosses real axis at ω = 0.7 rad/sec
d) crosses real axis at ω = 1.4 rad/sec
Answer : a
Q54. In a second order undamped system, the poles are on
a) positive real axis
b) imaginary axis
c) negative real axis
d) either (a) or (c)
Answer : b
Q55. For the system of the given figure, the undamped natural frequency of closed loop poles is
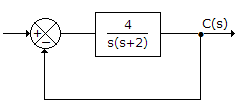
a) 2 rad/sec
b) 1 rad/sec
c) 0.5 rad/sec
d) 0.25 rad/sec
Answer : a
Q56. An open loop system has a forward path transfer function (42.25)/s(s + 6.5). The unit step response of the system starting from rest will have its maximum value at a time equal to
a) 0 sec
b) 0.56 sec
c) 5.6 sec
d) infinity
Answer : d
Q57. The polar plot in the given figure is for the term
a) jωT
b) 1 + jωT
c) 1/ jωT
d) 1/(1 + jωT)
Answer : b
Q58. The compensator in the given figure is a
a) lag compensator
b) lead compensator
c) lag-lead compensator
d) none of the above
Answer : c
Q59. If G(s) H(s) =  , the closed loop poles are on
, the closed loop poles are on
a) negative real axis
b) jω axis
c) right half plane
d) either (a) or (b)
Answer : b
Q60. For the block diagram of the given figure, the equation describing system dynamics is
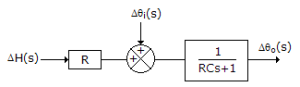
a) (1 + RCs) Δθ0(s) = Δθi(s) + R Δ H(s)
b) (1 + RCs) [ΔH(s)] = Δθ(s) – Δθ0(s)
c) (1 + RCs) Δθ0(s) = RΔ H(s) – Δ θi(s)
d) (1 + RCs) Δθi(s) = Δ H(s)[R] – Δθ0(s)
Answer : a
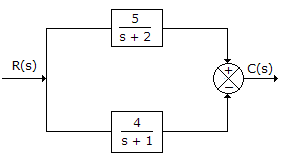
Q61. For the given figure C(s)/R(s)
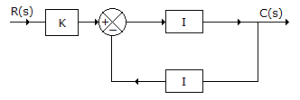
a) K
b) 0.5 K
c) 2 K
d) 0.25 K
Answer : b
Q62. Modelling error may occur due to
a) neglecting the nonlinear characteristics of plant
b) inaccuracy of parameters
c) change of plant characteristics with time
d) any of the above
Answer : d
Q63. In the given figure, P = 3 kg force. Then X(s) =
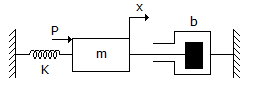
a) 3/ (ms +b +K)
b) 3/ (ms² +bs +K)
c) 3/ s(ms² +bs +K)
d) 3/ s² (ms² +bs +K)
Answer : c
Q64. In Bode diagrams an octave is a frequency band from
a) ω1 to 10 ω1
b) ω1 to 8 ω1
c) ω1 to 4 ω1
d) ω1 to 2 ω1
Answer : d
Q65. In position control system the device used for providing rate feedback voltage is
a) potentiometer
b) synchro-transmitter
c) synchro-transformer
d) tacho generator
Answer : d
Q66. Derivative control action is effective?
a) Only during steady state periods
b) Only during transient state periods
c) During both steady state and transient state periods
d) Either during steady state or during transient state periods
Answer : b
Q67. The response  is
is
a) undamped
b) underdamped
c) critically damped
d) oscillatory
Answer : b
Q68. For a first order system having transfer function, the unit step response is
a) 1 – e–t/T
b) e-t/T
c) –e-t/T – 1
d) 1 + e-t/T
Answer : a
Q69. Which of the following is not a necessary advantage of negative feedback system?
a) Feedback improves speed of response
b) Feedback improves stability
c) Feedback reduces effect of variations in system parameters
d) Feedback reduces the effect of external disturbances
Answer : b
Q70. A system has 12 poles and 2 zeros. Its high frequency asymptote in its magnitude plot has a slope of
a) -200 dB/decade
b) -240 dB/decade
c) -280 dB/decade
d) -320 dB/decade
Answer : a
Q71. The open loop transfer function of a unity feedback system is  The poles of closed loop system are at
The poles of closed loop system are at
a) -2, -2
b) -2, -1
c) – 2, ± j 1
d) – 2, 2
Answer : c
Q72. If  the polar plot, as the frequency is varied from 0 to infinity is
the polar plot, as the frequency is varied from 0 to infinity is
a) a semicircle
b) a circle
c) a straight line
d) none of the above
Answer : a
Q73. Examine the following statements
- Air and gases are compressible.
- Air, gases and some liquids are compressible.
- Oil can function as hydraulic fluid as well as lubricator.
Which of the above statements are correct?
a) 3 only
b) 2 and 3 only
c) 1 and 3 only
d) 2 only
Answer : c
Q74. Which control action is also called rate control?
a) Proportional
b) Derivative
c) Integral
d) Proportional plus integral
Answer : b
Q75. The gain margin for a stable system
a) has a positive decibel value
b) has a negative decibel value
c) has a large negative decibel value
d) none of the above
Answer : a
Q76. The signal flow graph of a system is shown in the given figure. The effect of disturbance TD can be reduced by
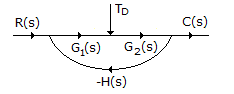
a) increasing G2 (s)
b) decreasing G2 (s)
c) increasing G1 (s)
d) decreasing G1 (s)
Answer : c
Q77. For overdamped systems a quadratic factor in transfer function can be replaced by two first order factors with real poles
a) True
b) False
Answer : a
Q78. The gain margin of first and second order systems is infinite.
a) True
b) False
Answer : a
Q79. One advantage of using polar plot is that it depicts the frequency response characteristics over the entire frequency.
a) True
b) False
Answer : a
Q80. The force required to initiate motion between two contacting surfaces is called
a) coulomb friction
b) viscous friction
c) static friction
d) none of the above
Answer : c
Q81. Assertion (A): Derivative control action cannot be used alone.
Reason (R): Derivative control action is effective only during transient periods.
a) Both A and R are correct and R is correct explanation of A
b) Both A and R are correct but R is not correct explanation of A
c) A is correct but R is wrong
d) R is correct but A is wrong
Answer : a
Q82. The slope of log magnitude curve near the cut off frequency is called cut off rate.
a) True
b) False
Answer : a
Q83. The system in the given figure
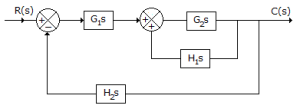
a) will be unstable due to the presence of positive feedback in the inner loop
b) may be stabilized by the negative feedback outer loop
c) can never be stable
d) will always be stable
Answer : b
Q84. The units of thermal capacitance are
a) k cal/°C
b) °C/k cal
c) °C sec/k cal
d) none of the above
Answer : a
Q85. Nichols chart consists of M and N locii in log magnitude versus phase diagram.
a) True
b) False
Answer : a
Q86. If  , initial and final values of i(t) are
, initial and final values of i(t) are
a) zero and 1
b) zero and 10
c) 10 and zero
d) 70 and 80
Answer : c
Q87. The given figure shows three Nyquist plots of G(s) H(s) = e-sT/[s(s + 1)] for different values of T. The curves 1, 2, 3 can be
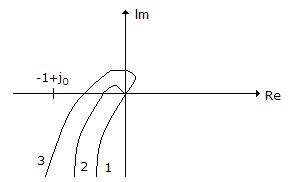
a) for T = 0, 0.5 and 1 respectively
b) for T = 1, 0.5 and 0 respectively
c) for T = 0.5, 1 and 0 respectively
d) for T = 0, 1 and 0.5 respectively
Answer : a
Q88. Consider the following statements:
The gain margin and phase margin of an unstable system may respectively be
- positive, positive
- positive, negative
- negative, positive
- negative, negative
Of these statements
a) 1, 4 are correct
b) 1 and 2 correct
c) 1, 2, 3 are correct
d) 2, 3, 4 are correct
Answer : d
Q89. A first order element yields almost exact duplication only for constant or slowly varying phenomenon.
a) True
b) False
Answer : a
Q90. For a stable system
a) both phase and gain margin are negative
b) both phase and gain margin are positive
c) phase margin is positive but gain margin is negative
d) gain margin is positive but phase margin is negative
Answer : b
Q91. If  the angle of departure of root locus at s = – 1 + j is
the angle of departure of root locus at s = – 1 + j is
a) zero
b) 90°
c) -90°
d) -180°
Answer : d
Q92. The number of branches of root locus plot is equal to
a) the number of roots of characteristic equation
b) double the number of roots of characteristic equation
c) the number of roots of characteristic equation minus one
d) the number of roots of characteristic equation plus one
Answer : a
Q93. The action of bellows is similar to that of
a) mass
b) viscous friction
c) spring
d) none of the above
Answer : c
Q94. As the bandwidth increases, the cost of components
a) generally decreases
b) generally increases
c) may increase or decrease
d) does not change
Answer : b
Q95. If Nyquist plot has a encirclement of (-1 + jo) point, the system is stable if
a) there are no poles of G(s) H(s) in right-half plane
b) there is one pole of G(s) H(s) in right-half plane
c) there is no zeros of G(s) H(s) in right-half plane
d) none of the above
Answer : a
Q96. A conditionally stable system has
a) one phase crossover frequency
b) two phase crossover frequencies
c) two or more phase crossover frequencies
d) one or more phase crossover frequencies
Answer : c
Q97. In a pneumatic bellows
a) the input surface, output surface and side walls are corrugated
b) the input surface and output surface are flat but the side walls are corrugated
c) the input surface and side walls are flat but the output surface is corrugated
d) the input surface and output surface are corrugated but the side walls are flat
Answer : b
Q98. If  then f(t) =
then f(t) =
a) cos θ0t
b) sin ω0t
c) eat cos ω0t
d) e-at cos ω0t
Answer : d
Q99. When time constant T in any factor is varied, the shapes of log magnitude and phase angle curves remain the same.
a) True
b) False
Answer : a
Q100. Which of the following is not correct for two phase servomotor?
a) Rotor diameter is small
b) Applied voltages are seldom balanced
c) Rotor resistance is low
d) Torque speed curve is linear
Answer : c